Here is a new clip of my robot getting its self out of a tight corner, this might not be so impressive at face value but it demonstrates the latest iteration of the robots obstacle evasion program. This has big advantages over the last version of the code in that it is continuously scanning the surrounding area and reacting proportionally, as apposed to the stop start nature of the last code.
Here is the main body of the code: void loop (void) { // Main body of the program
int inches;
while(inches>15) // while nothing is within 15 inches do the following { if (pos == 0) { dir = 3; // if it is looking left direction is positive headservo.write(pos); // tell servo to go to position in variable 'pos' delay(3); }
else if (pos == 180) { dir = -3; // if it is looking right direction is negative headservo.write(pos); // tell servo to go to position in variable 'pos' delay(3); // waits 3ms for the servo to reach the position } headservo.write(pos); inches = ping (); // anybody there? pos += dir; // recalculate position variable forward(1); // Move forward
}
int x = headservo.read(); wait(0); // stop the robot
if(inches>7) // for objects further away turn gradually { if (x>=0 && x<90) { rightservo.write(96); leftservo.write(0); delay(100); }
if (x>=90 && x<=180) { rightservo.write(180); leftservo.write(94); delay(100); } } else // for close objects turn hard {
if (x>=0 && x<90) { right(100); } if (x>=90 && x<=180) { left(100); } } }
Please note that this is not the complete code, nor is it optimised.
There are many robots that use this type of navigation, however it took me several tries to get it working correctly, i struggled to find any good guides on writing this kind of program (which is unusual for the Arduino community). If you are trying to program a robot this way i will offer any information i can, i may also write a tutorial at some point. Until then there is a full version of the code on my LMR page. http://letsmakerobots.com/node/15803
Here are some new videos of my Arduino based robot, this project has been going on for a while now and is coming to an end. The chassis is complete and the electronics are almost finished.
I am currently working on some example instruction material that would be supplied with the kit if it were to go into production. I am also drawing up designed for some extra parts that could be attached and detached from the chassis to give the robot extra capabilities, line following and a mechanical grabber for example.
You can see in the videos i have taught the robot to drum! this was an experiment to demonstrate the versatility of the base. I have also added a tri-colour LED that is underneath the white dome to provide me with another output method.
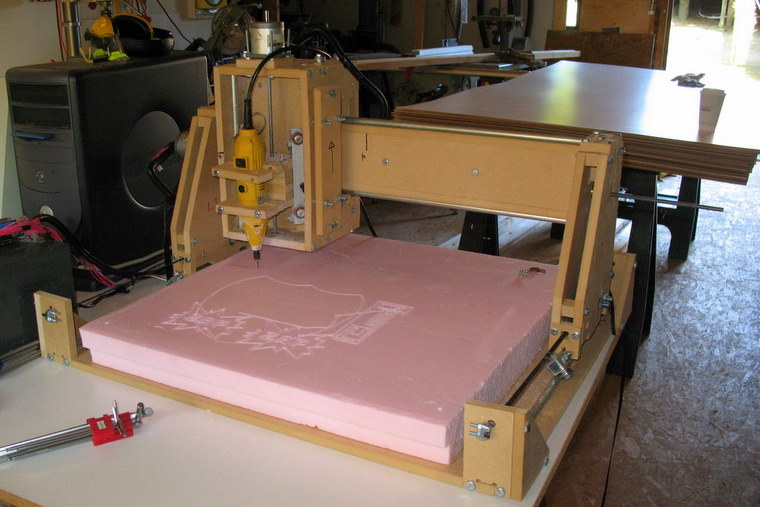
Take a look at any of the popular hacker/maker websites within the last few months and you may have noticed an increasing number of people making their own CNC machines. CNC stands for computer numerical control, CNC machines have been used in industry for decades now but they are beginning to become more available to the general public. CNC machines can come in many forms but the types most popular within the maker community are routers and rapid prototyping machines. CNC routers start with a solid piece of material and subtract material as required, rapid prototyping machines build up the model by depositing a type of plastic in layers. here are some examples of CNC routers made by the maker community:
CNC machine v2.1 - aka "Valkyrie Reloaded" - made by TinHead from Letsmakerobots.com
Another popular choice for makers is a rapid prototyping machine, these usualy come as kits like the Cupcake CNC from Makerbot industries. This is capable of making complex 3d parts very simply. The idea is that in a few years machines like this will be commonplace on workbenches all over the world.
recently i have been working on a robot for a school project. The pictures you see here are the culmination of several months of work. All the pieces are made out of acrylic and cut using a laser cutter. The robot was designed to be sold as a kit and can be assembled simply by bolting it together. It uses 2 continuous rotation servos for propulsion and could be controlled using whatever micro controller you like, here I'm using an Arduino mega.
The robot is designed to be expandable, I am in the process of designing extra parts that can be connected to the robot to get it to perform different functions, light following and line sensing for example. There is also space for the user to
experiment with their ideas. I was required as a part of my course to consider production costs and strategies however
extra design work would be needed to start production.
i spend a lot of time building robots, however their usually friendly looking wheeled contraptions not at all like this.....
This is a six legged walking robot or Hexapod. it was made by Zenta from the Trossen robotics forum. What i find so great about this robot is that it looks so natural, the movements are so smooth that you would be forgiven for this thing had just crawled out from under a rock in the Amazon.
I am keen to make a walking robot of some kind, perhaps a miniature one with micro servos and polymorph, here's a great walking robot for beginners.http://letsmakerobots.com/node/7129
This is a cool robot made by one of the Letsmakerobots.comcommunity. Cant wait to get started on mine :) more soon.
ps: If you like the blog please tel your friends, want to start getting more visitors :P
For those of you who haven't come across Arduino, it is a great open source microcontroller that can be used in all kinds of electronic applications. I have made several robots using Arduino, i chose Arduino because it is so easy to use. There is a wealth of software libraries that make programing simple. I knew nothing about programing before starting with Arduino but i found learning very easy using a number of great online guides and tutorials.The possibilities using Arduino are endless, check out Jeff's Arduino blog. If your looking to get into programing or electronics its definitely worth a look.
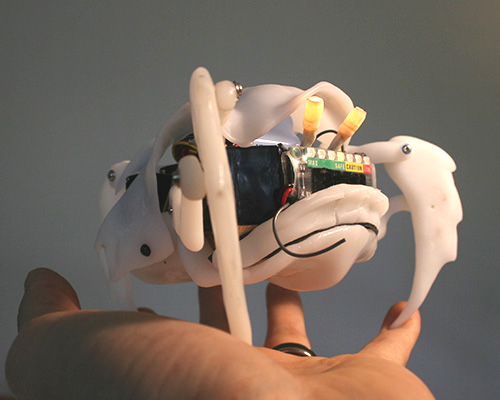
recently i came across a great looking material called Polymorph or Shapelock in the US. Its a polymer similar to Nylon but with a very low melting point (62C). This means that when it is put in hot water it becomes soft and mailable, it can then be sculpted and moulded in to any shape you want. When it cools it returns to its normal state and is actually very hard.above is a picture of a robotic crab called Swashbot 3 it's made entirely out of polymorph and looks brilliant. I've ordered 1kg of polymorph and a whole load of micro servos, time for a walking robot me thinks :)
OK i know its only been a few minutes since the first post :P but i wanted to throw out some more information about MAKE: magazine. This is an absolutely brilliant publication by O'reilly media. It's a quarterly magazine published and soled in the US, unfortunately it only available in the UK online, but its well worth it. It's jam packed with great projects from robotics to T shirt cannons to ancient throwing weapons. They also have a great online community and web store. But the thing i like most about MAKE is that it is more than just a magazine or a community, behind this lies an ethos. Here is the Maker bill of rights it kind of demonstrates what I'm saying.
Well here it is, the first post. Blank pages make me angry so i'll get straight to it.
in this blog i'm going to :
Post the best online projects i find on my interweb travels.
Post updates of my own projects.
Any other useful or interesting bits and pieces to do with Making, Hacking, robotics and electronics that catch my eye.
A bit about me:
I'm interested in electronics, robotics and making in general. I started making robots a few years ago, since then my projects have become more advanced (and more expensive eeeek!). I'm currently studying engineering at A level and hope to start a course in Electronics at university soon.
Anyway i spend alot of time sufing the web looking for ideas and inspiration and thinking "I want one of those!!". At the moment i'm building a robot for my A level course, i'll be posting updates here along with all the other stuff.
Heres my robot:
and here are a few of my favorite websites to get you inspired: